

纳米榫卯

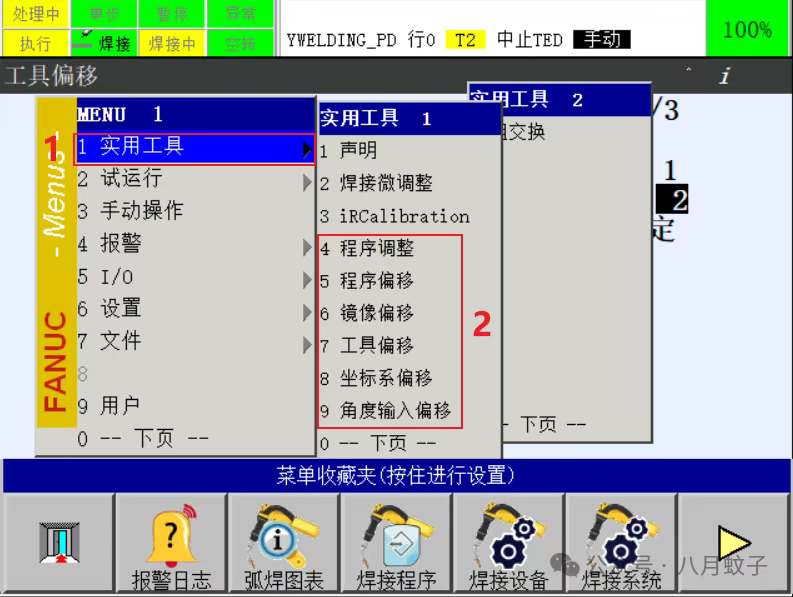
发那科机器人在实际应用过程中,当程序编写完成后发现示教点位整体偏离目标点一个距离,这时重新校正点位比较麻烦,这时就可以采用程序偏移的方法来完美解决这个问题。在发那科程序编写过程中,涉及多种类型的程序偏移快速调节方式,主要的程序快速调节类型包括程序调整、程序偏移、镜像偏移、工具偏移、坐标系偏移、角度输入偏移。粉丝们可以通过示教器上的“MENU”菜单-“1-使用工具”-“5-程序调整”等6种程序调整/偏移的操作入口。下面将对这6种程序调整/偏移进行逐一深度解析,让您轻松玩转发那科机器人常用6种程序调整/偏移操作。
一、程序偏移类型
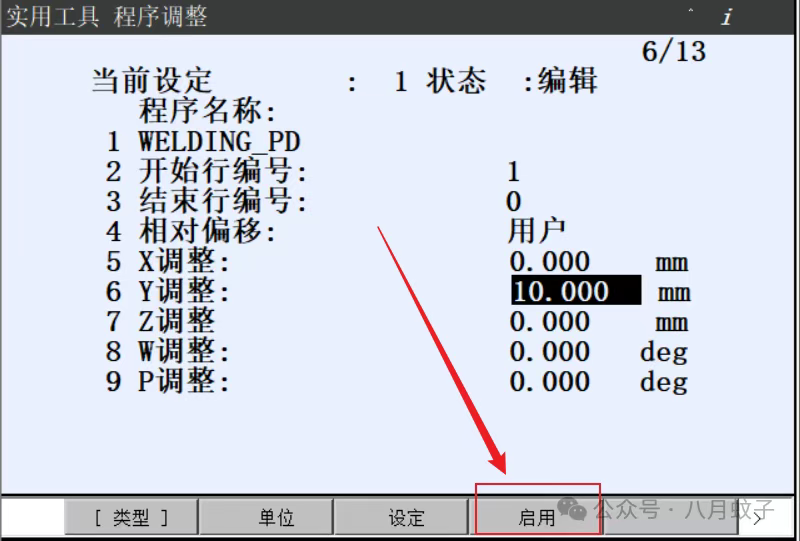
程序调整(Program Adjustment)是指对现有程序的局部修改,程序偏移中的调整部分,指定需要调整的程序开始行和结束行、调整的参考坐标系、各轴的调整距离,需要结合程序偏移的应用方法说明。
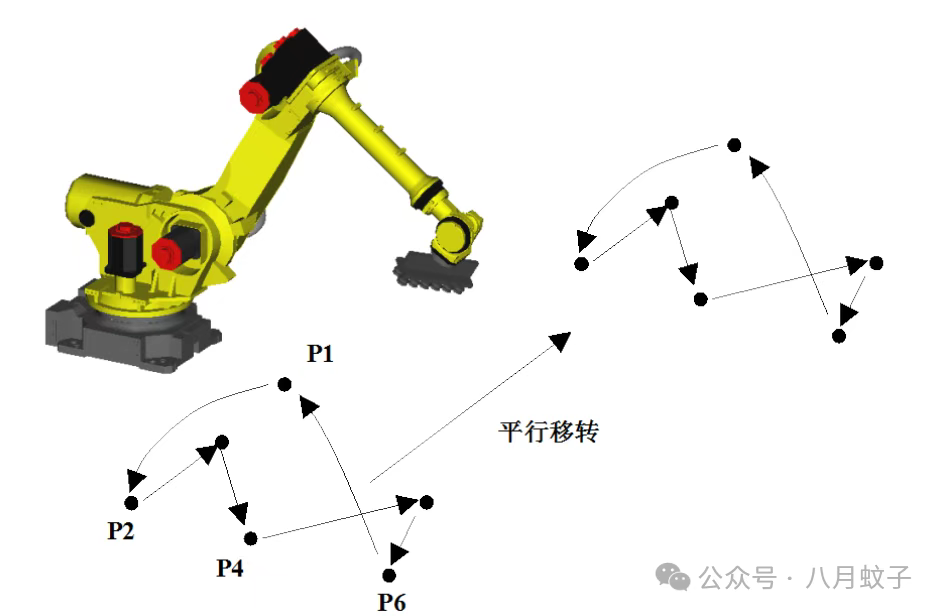
程序偏移(Program Offset)通常指的是对程序中某一范围内的动作语句进行三维平行或平行旋转的位移。应用方法包括进入设置菜单选择程序偏移,指定原程序和新程序,输入偏移量或代表点。例如,加工轮胎轮孔时,只需示教一个位置,程序偏移可以生成其他位置的数据。
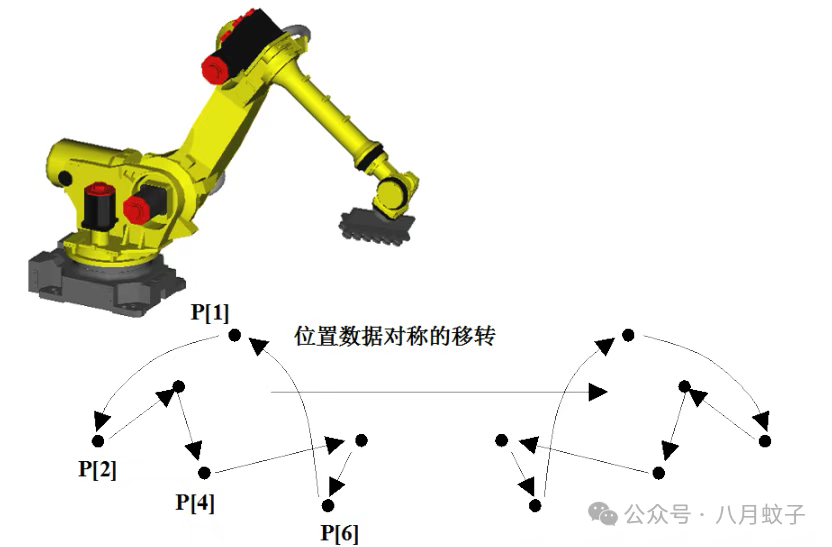
镜像偏移(Mirror Offset)描述为以面对称的方式偏移示教位置。应用时需选择镜像偏移菜单,指定对称面或代表点。例如,镜像偏移可以用于对称工件的加工,通过设定镜像面,机器人自动生成对称位置的路径。
工具偏移(Tool Offset)主要基于工具坐标系的调整。工具偏移通过Tool_Offset指令实现,影响工具坐标系下的位姿。例如,工具Z方向的抬升可以通过设置工具坐标,适用于焊接或加工时需要调整工具高度的情况。
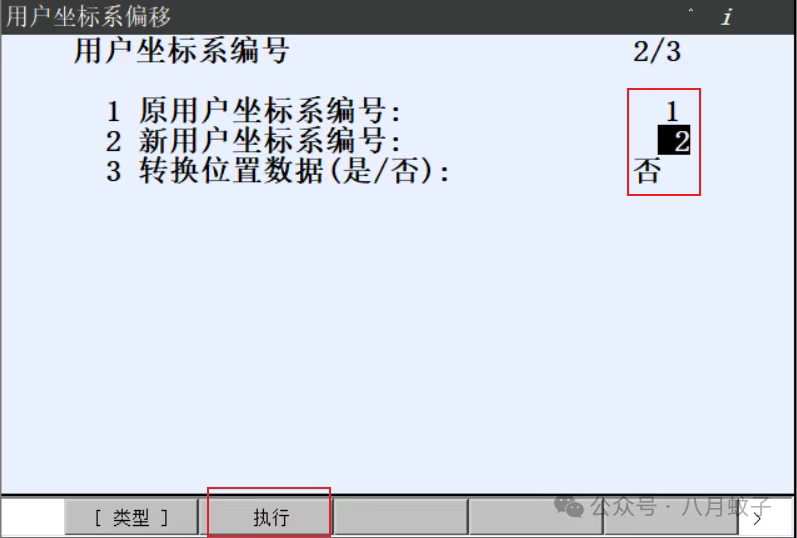
坐标系偏移(Coordinate Frame Offset)通常涉及用户坐标系或工具坐标系的整体调整。例如,撞击后需要重新校正工具坐标系或用户坐标系,使用TCP固定或工具补偿指令调整所有位置点。坐标系偏移改变整个坐标系的参考点,影响所有在该坐标系下的运动指令,该偏移方法危险性较高,请务必慎用。
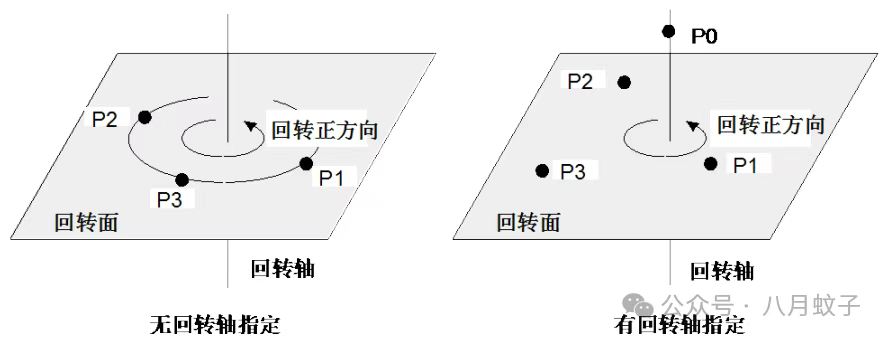
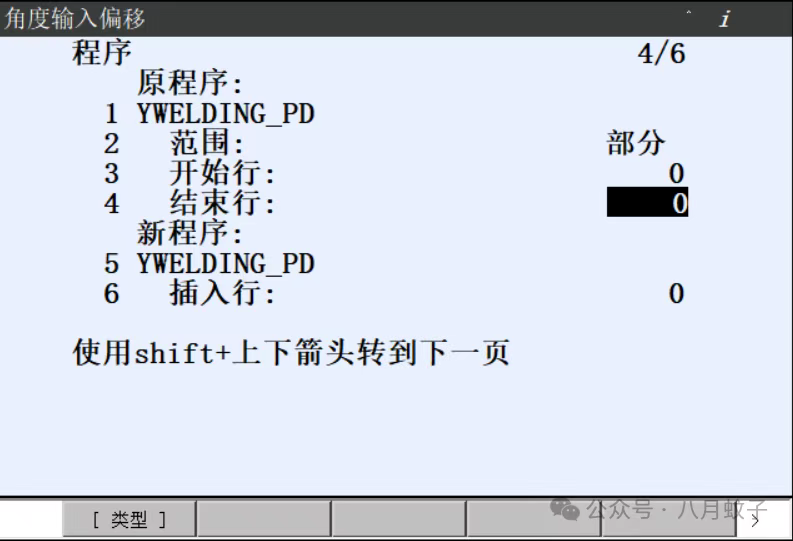
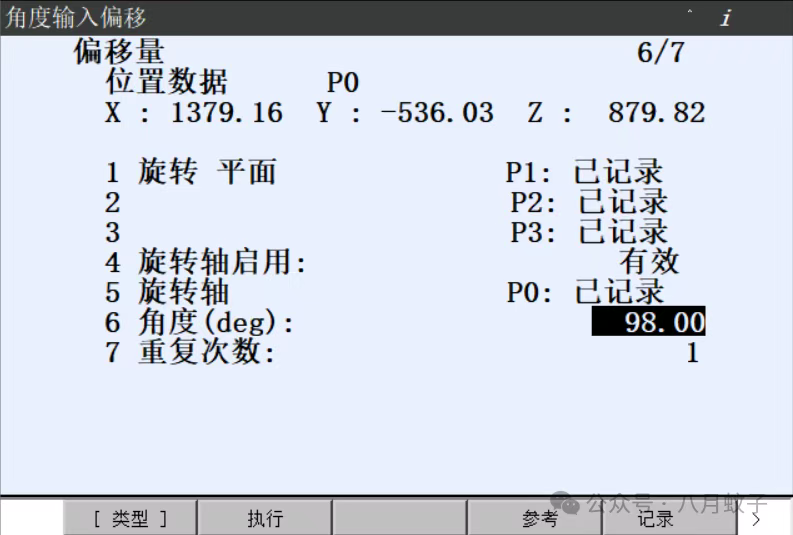
角度输入偏移(Angle Input Offset)描述为通过指定旋转轴、角度和次数进行等间隔旋转位移。应用时需进入角度输入偏移菜单,设置旋转平面、角度和重复次数。适用于圆周均匀分布的任务,如轮胎孔加工,只需示教一个位置,通过角度输入生成多个位置。
| 程序偏移 | ||
| 镜像偏移 | ||
| 工具偏移 | ||
| 标系偏移 | ||
| 角度输入偏移 |
下面将详细对这6种程序调整/偏移具体的详细操作步骤与参数设置进行解读。

' fill='%23FFFFFF'%3E%3Crect x='249' y='126' width='1' height='1'%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
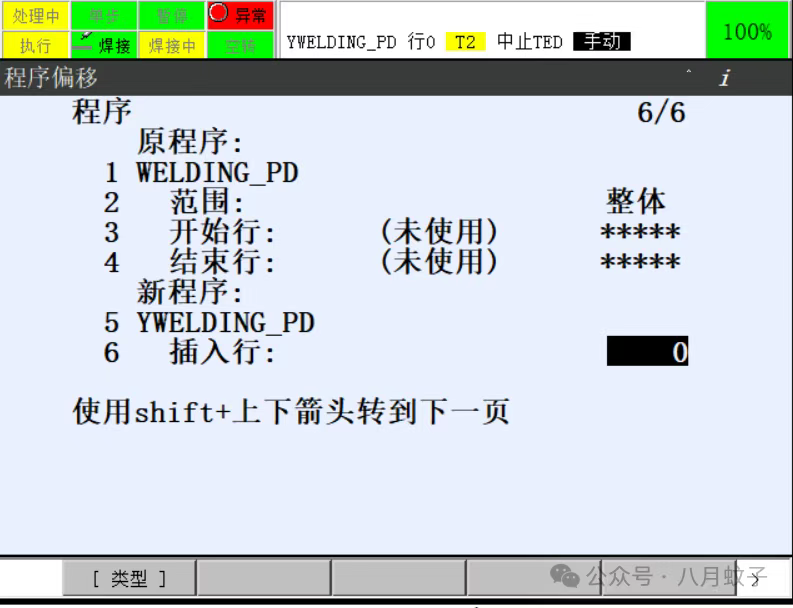
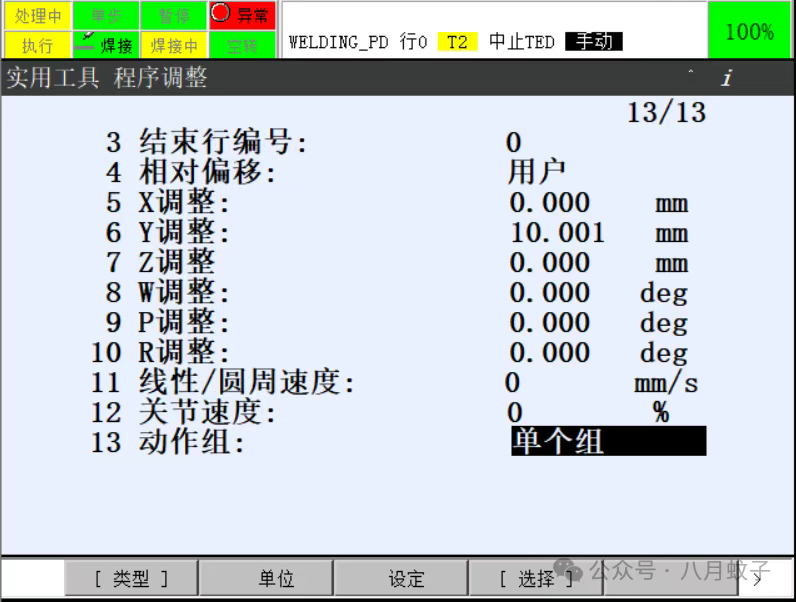
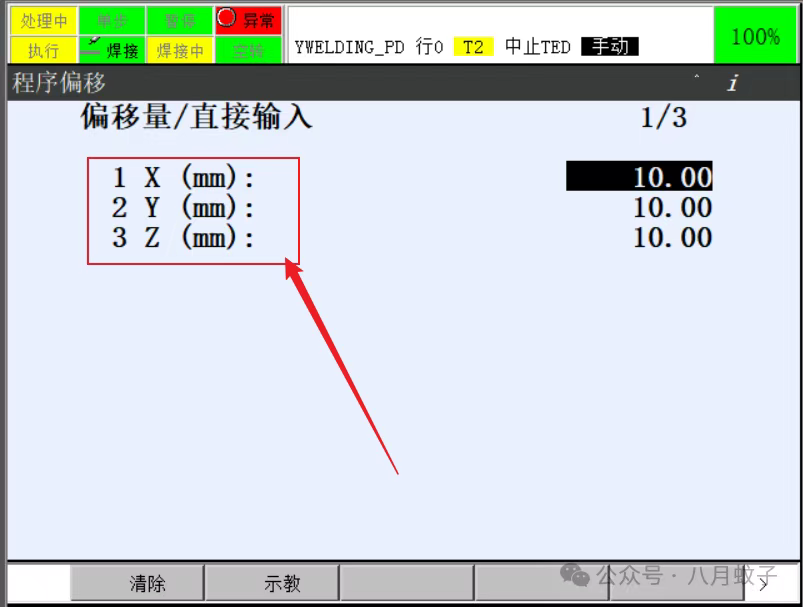
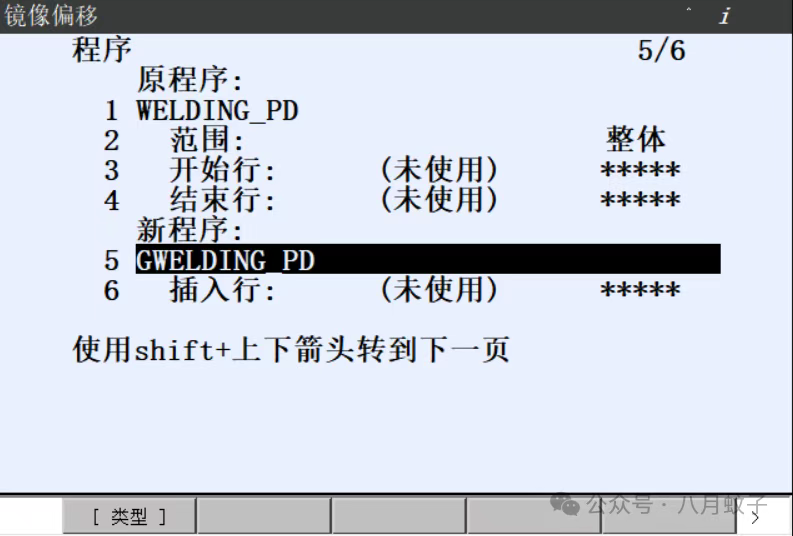
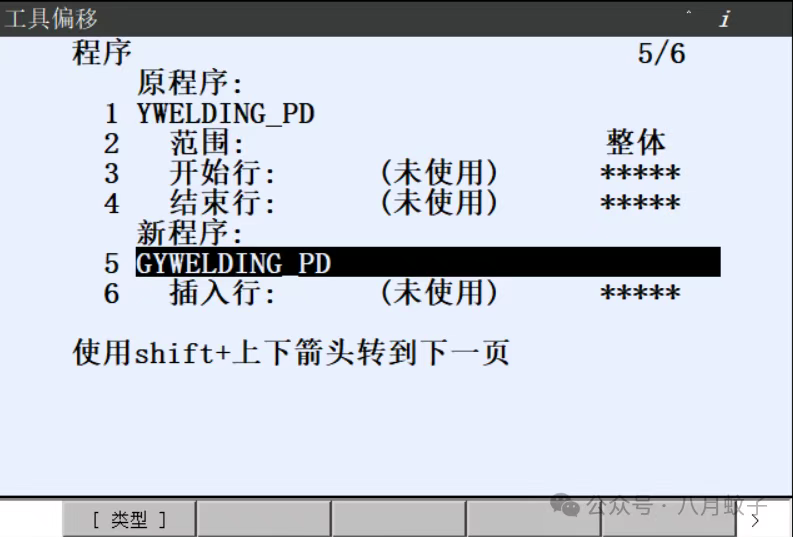
当选择整体偏移时,整个程序偏移;当选择部分偏移时,可指定偏移的范围。完成以上设定后,按shift+上下箭头转到下一页,该页是关于偏移点位的设置,有直接输入法和旋转示教法。
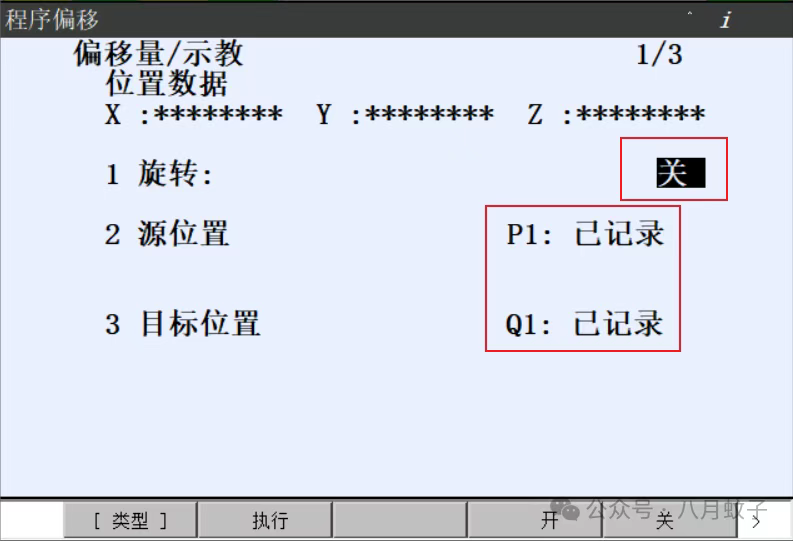
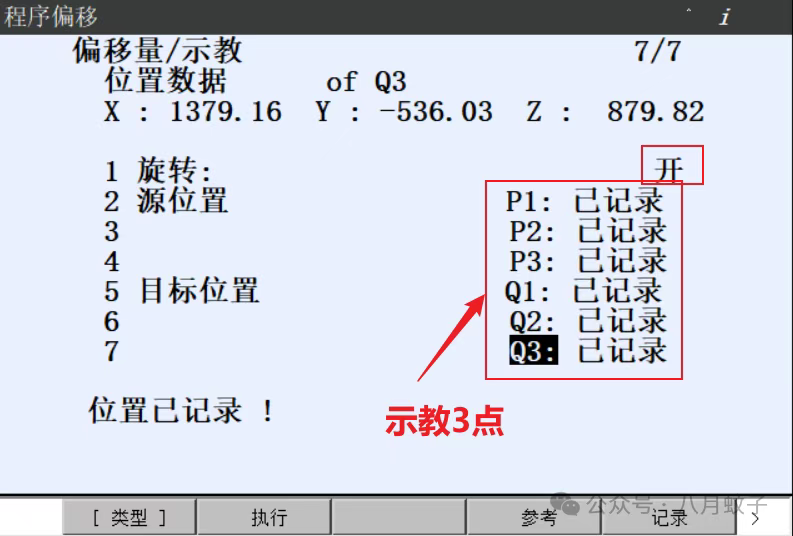
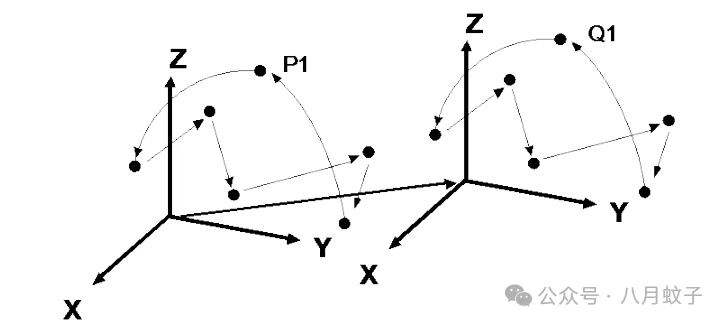
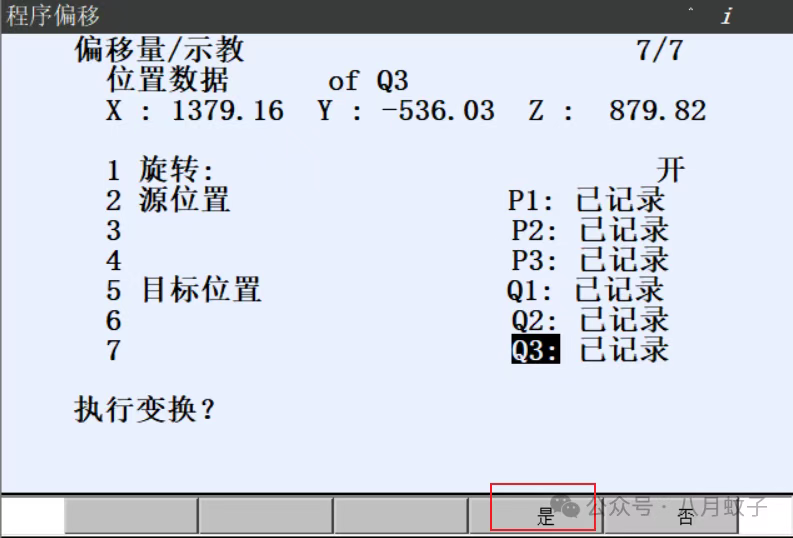
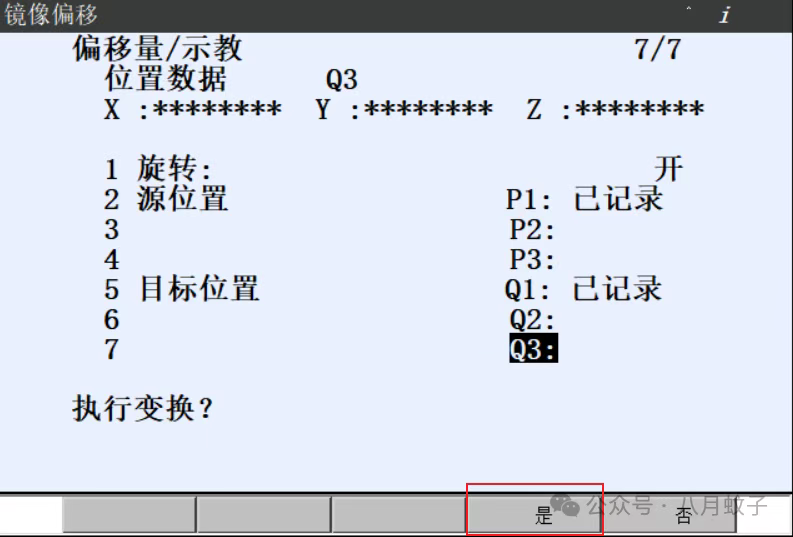
开启旋转非平移偏移程序,需3点确认空间位置数据。分别记录原程序中的三个点位数据,再记录偏移后的三个点位数据,机器人会根据前后确认的空间位置自动计算空间偏移量,然后根据偏移量对要偏移的位置数据进行偏移。
完成源位置和目标位置的示教后,按键【执行】,在弹出的按键中选择【是】,即可自动生成新的偏移后的程序或覆盖原程序。
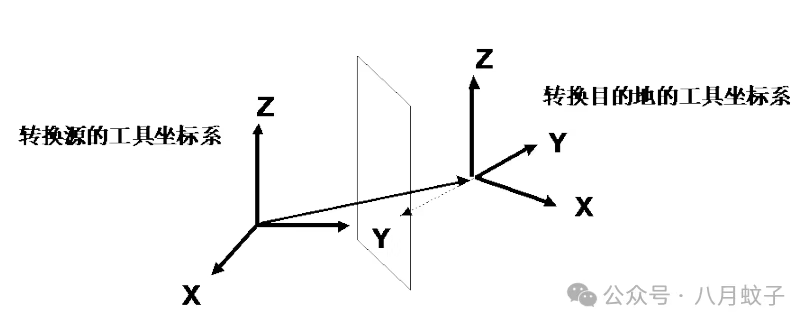
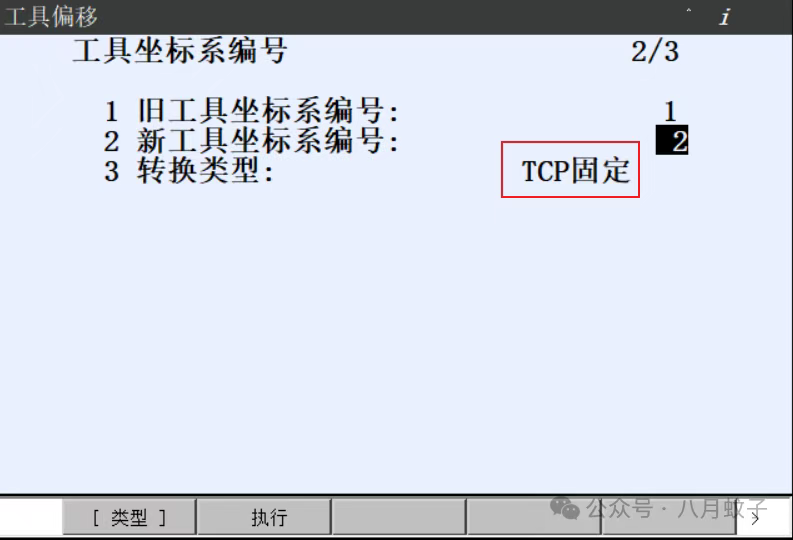
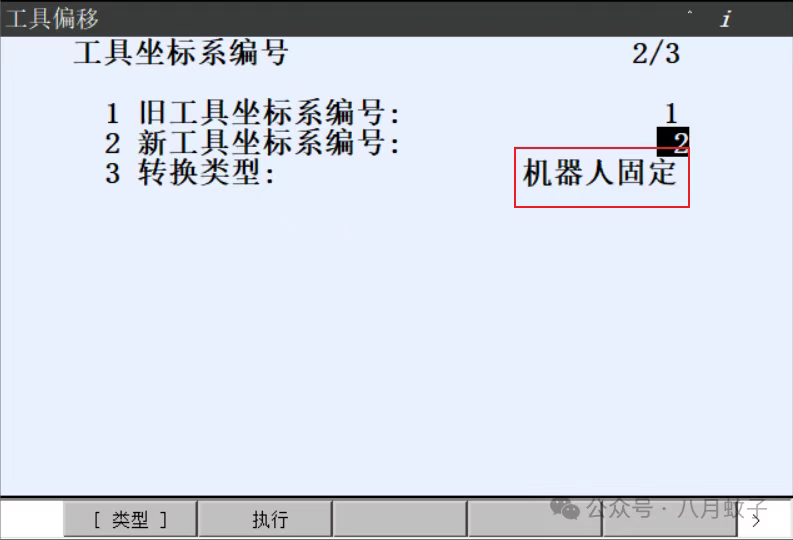 输入原工具坐标系编号,新的工具坐标系编号,转换类型可选择TCP固定或机器人固定,当选择以TCP固定方式转换的,可以看出机器人的TCP中心点动作保持一致。
输入原工具坐标系编号,新的工具坐标系编号,转换类型可选择TCP固定或机器人固定,当选择以TCP固定方式转换的,可以看出机器人的TCP中心点动作保持一致。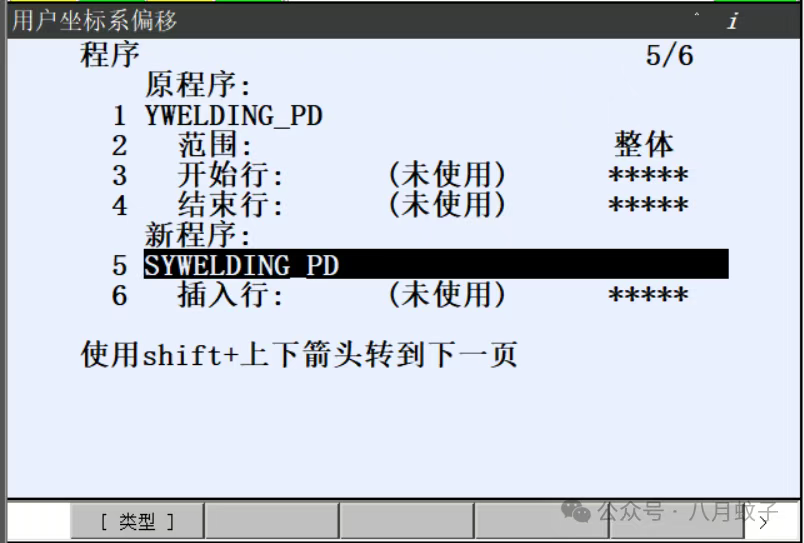
转发收藏本文,助您轻松玩转发那科机器人常用6种程序调整/偏移操作! 🚀
END
主编:八月蚊子 | 校对:小灰灰 | 审核:大棕熊