数智新视
双碳目标背景下,我国新型电力系统呈现出“双高”特征,系统惯性减小,电网强度减弱。近年来,能够适用于弱电网环境的构网型(grid-forming,GFM)控制策略成为相关领域的研究焦点,下垂控制和虚拟同步机技术尤其受到关注。即使在各类新型控制技术迅速发展的当下,下垂特性仍有重点分析和再认识的必要。在下垂控制中,常需引入虚拟阻抗以实现功率解耦、过电流抑制等功能,但同时,虚拟阻抗的加入也将显著影响下垂控制的端口特性。
目前,下垂控制具有较好天然适应性的根本原因认识还不够深刻,此外,引入虚拟阻抗对采用下垂控制的电力系统有何影响、与同步机等控制策略的动态特性有何异同等相关问题亟需进一步探索,值得学界和工业界的共同关注。
根据下垂控制表达式:

结合图1,考虑电网环境为感性,同时基于小功角假设,列写变流器输出的有功功率和无功功率表达式,如下:
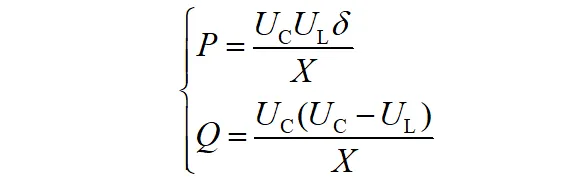
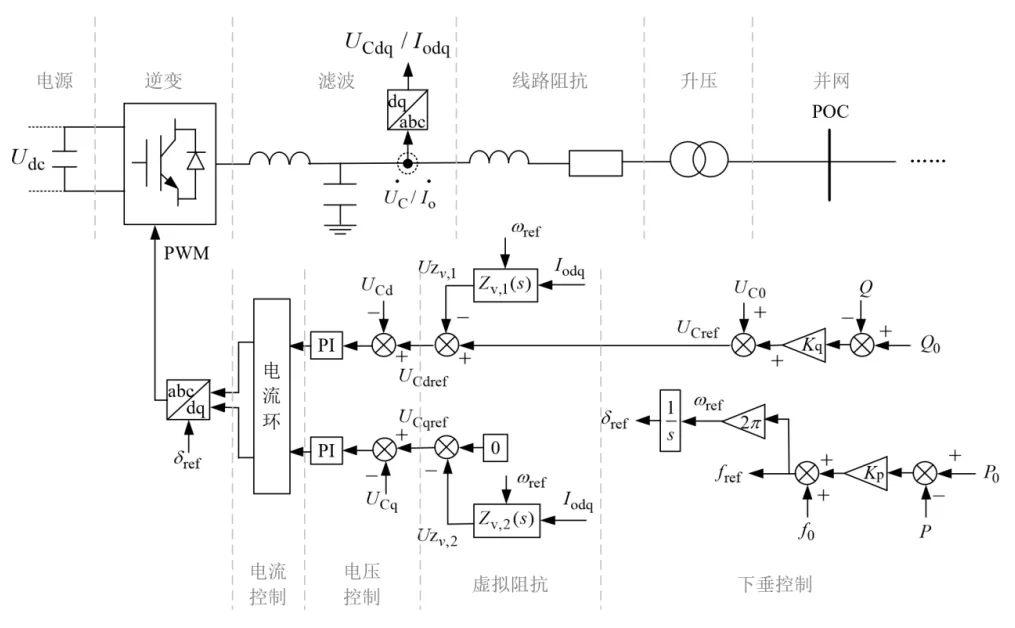
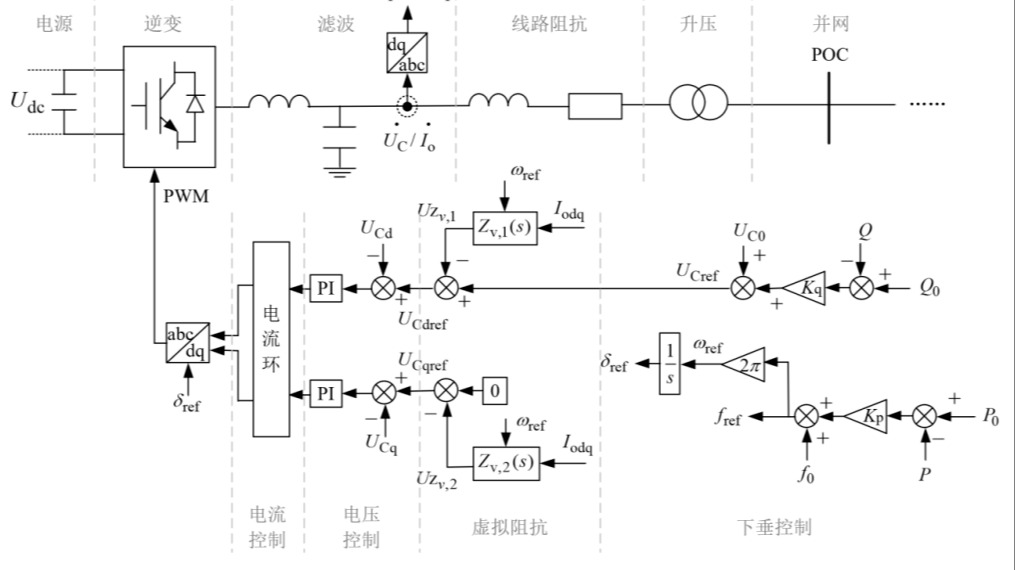
图1 下垂控制全环节示意图
当电网突然抛载时,网内相关母线的电压相位将发生前移,母线瞬时频率增加,由于阀侧相位变化响应在时间上有滞后性,还来不及发生改变,导致此时变流器侧相对于网侧的相位差突然变小,变流器输出的有功功率将下降,P0 > P,下垂系数Kp为正数,依据下垂特性,fref将会上升,即为下垂控制设定了一个更高的频率参考点,这种参数变化顺应了网侧的频率变化趋势。
当网侧发生扰动或短路故障导致其电压突然下降时,变流器输出的无功电流和无功功率将瞬时上升,Q0 <Q,Kq为正数,依据下垂特性,UCref将会下降,即为下垂控制设定了一个更低的电压参考值,同样顺应了网侧的电压变化趋势。
这本质上是在讨论当网侧状态和参数发生改变时,阀侧应作何响应的问题。显然,网侧和阀侧的动作在时间和顺序上具有前后关系,在逻辑上具有因果关系。下垂控制本质上是顺势有差调节,其代偿输出的无功功率并不足以完全补偿网侧电压的下降并维持网侧电压稳定,因为在下垂特性的作用下,源端电压也将随之下降,虽然其代偿性地输出了一定的无功功率,但源端对于电网的电压支撑能力仍会减弱。
2)电压参考值的设计。
对电压控制点电压的设计而言,下垂控制所具有的天然适应性会在一定程度上掩盖其参考值在设计上的缺陷。因此,电压控制点选取和参数整定的好坏直接关系到下垂控制的效果甚至是影响到电压控制目标能否达成。在新型电力系统构建过程中,虽然采用构网型控制策略的新能源机组数量占比逐渐上升,但传统的同步发电机等火电机组依然存在并仍占据着主导地位,此时由同步机等构建的系统网侧内电势仍可保持相对稳定,各构网源只需要向其靠拢即可。必须提前考虑如何为众多的构网源协调设定合理的电压控制目标,即电压参考值这一问题。
以单构网源并网为例,可考虑从交流滤波电容处对整个电力网络进行划分,如图2所示。划分后的左侧部分包含从构网源到交流滤波电容之间的部分,称之为“源侧”;右侧部分包含从交流滤波电容到电网负荷的部分,称之为“网侧”。
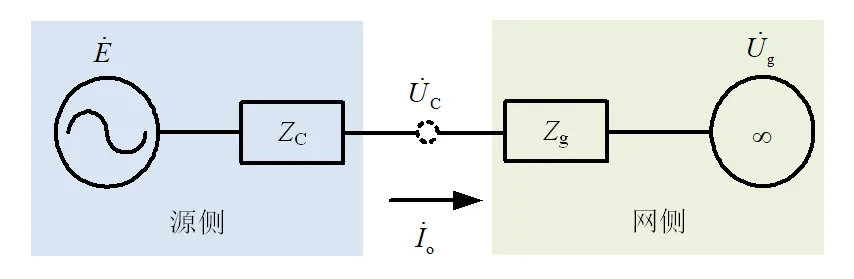
图2 单构网源并网结构划分示意图
值得指出,对某单构网源并网接入系统而言,本质上是两个电压源(即此待并网的单构网电压源与待接入电网这一等效大电压源)之间的协调问题。该待并网的单构网电压源经阻抗补偿后的电压控制点控制目标值,原则上需要尽可能地向待接入网侧等效大电压源的内电势靠拢,进而使得该构网电压源的接入不会对待接入电网的运行产生不协调的影响。这里的内电势,指的是该单个构网源从自己的并网端口所感知到的从等效大电压源处传来的等值内电势。其余每个构网源的分析也可采用类似思路。
3)虚拟阻抗的作用及其对系统源端特性的影响。
在将虚拟阻抗接入系统时,部分设计者常刻意将流过虚拟阻抗上的电流设计为反向(即其电流正方向为网侧流向阀侧),也可以理解为是加入一种反向虚拟阻抗。相关研究领域通常意义上所指的“虚拟阻抗”,正是这种反向虚拟阻抗,此时的虚拟阻抗并不是以类似于线路阻抗的方式加在系统中,而是成为变流器源侧等值内抗的一部分。由此,相当于在变流器原有输出电压的基础上减去一个由虚拟阻抗所带来的压降,从而起到降低变流器机端输出电压的作用,进而实现对过电流的抑制。
需要指出,在正常运行工况下,在加入虚拟阻抗前,系统表现出的下垂特性,是一种自然响应特性,即在不对系统施加主动控制的前提下,当戴维南电压源端口接入的电抗感性负荷增加,其输出的无功功率随之增大,进而引发端口电压被拖拽至更低。而虚拟阻抗的加入将导致源端特性发生重塑,即变流器交流电容处电压可能不再符合“下垂”特性,而是“上扬”特性,即机端电压和无功出力同向增加。这种上扬特性应该被认为是一种强电压源的主动控制特性,符合对同步机调压特性的直观物理认知。
以图3所示的最简单的戴维南等值电压源(戴维南端口系统等值阻抗含电源内抗和线路阻抗)带恒阻抗负荷的模型为例,设计改变负荷大小的多组工况,观察荷侧电压幅值与无功功率之间的变化关系。
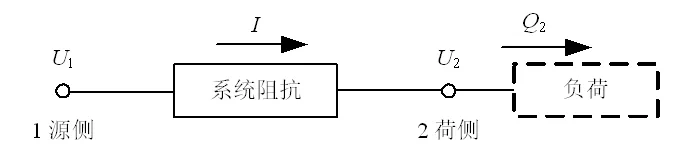
图3 戴维南等值电压源经系统阻抗带恒阻抗负荷模型
对数据进行标幺化处理,设电压源幅值为1,系统阻抗模值为1。保持负荷功率因数不变,且单组负荷阻抗模值均为2,依次以并联方式增加所投入的负荷阻抗组数(并联负荷投入的组数从1依次增加至10,负荷额定容量随投入组数增加而依次增大),可绘制出如图4所示的图像,图中纵坐标分别代表荷侧电压幅值、无功功率标幺值(以可达到的最大无功功率为基准),横坐标代表系统阻抗与负荷阻抗模值之比。
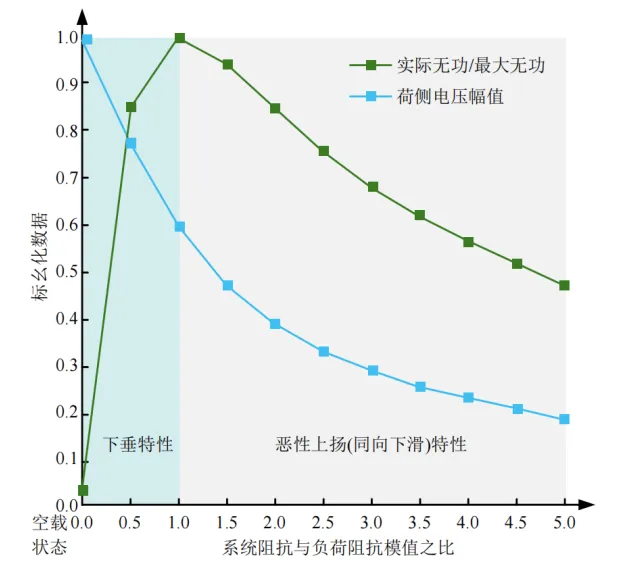
图4 荷侧电压幅值与无功功率之间的变化关系曲线
可以看出,图4中的左半支曲线代表了常规下垂控制特性,但右半支曲线中的端电压幅值和输出无功功率之间却出现了同向增减趋势,这是因为在端口电压水平过低的不良运行工况下,源端有限的带载能力被耗尽。这种电压水平过低的不良运行状态,在上述戴维南等值电压源带恒阻抗负荷模型的端口Q-U静特性曲线中的左半支也体现得尤为明显。令负载阻抗模值从100到0.2之间均匀递减变化,绘制出的Q-U曲线如图5所示。

图5 戴维南等值电压源带恒阻抗负荷模型的端口Q-U静特性曲线
在曲线的右半支,在虚拟阻抗的作用下,机端电压参考值与实际值同时下降,甚至陷入到越来越低的恶性循环。这与构网型控制本身所需要具备的电压支撑构网能力背道而驰。因此,本文认为引入虚拟阻抗后在变流器机端端口所表现的上扬特性是一种“恶性”上扬(即“同向下滑”,机端电压越低,发出无功越小),这种特性对系统稳定运行是不利的。进一步地,常规设计方法下的虚拟阻抗在抑制过电流、实现电压支撑目标这两方面的作用存在一定的冲突,二者在同一时刻不可兼得。
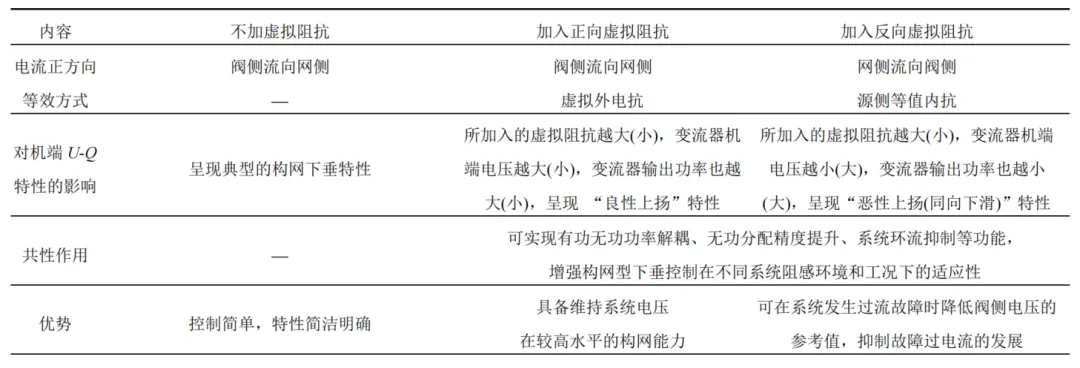
基于上述分析,本文提出一种“双向虚拟阻抗”设计方法,即在系统正常运行时,使虚拟阻抗上流过的电流为阀侧流向网侧的正向电流,引入正向虚拟阻抗(即虚拟外电抗),有助于适当抬高变流器机端电压,进而提升其电压支撑和构网能力;而当系统出现过流故障时,将虚拟阻抗上流过的电流反向,即将电流正方向变为从网侧流向阀侧,引入反向虚拟阻抗,有效降低机端电压,抑制故障过电流。双向虚拟阻抗除了可以通过改变其上流过电流的方向实现,还可以通过修改虚拟阻抗数值的正负实现。这种双向虚拟阻抗的控制逻辑示意图如图6所示。不加虚拟阻抗、加入正向或反向虚拟阻抗的对比见表1。本文在MATLAB/Simulink平台搭建了相关模型对所提方法及结论进行验证。
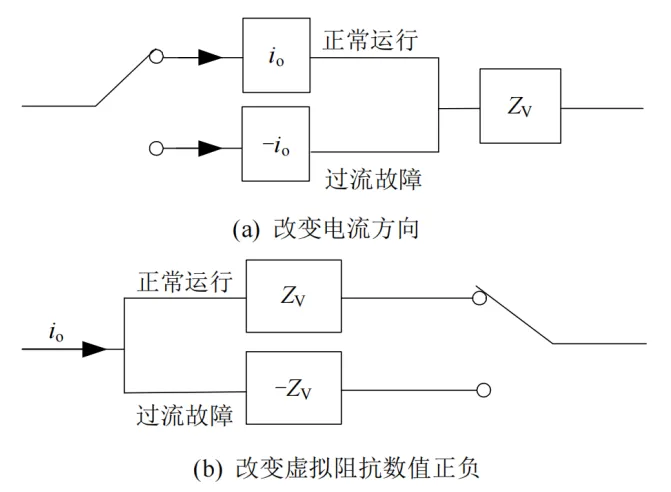
图6 两种实现双向虚拟阻抗控制的逻辑示意图
表1 不加虚拟阻抗、加入正向或反向虚拟阻抗的对比
本文对下垂控制中引入电压电流双闭环的必要性和作用进行了分析,并对下垂控制的本质进行了讨论。下垂控制所反映的其实是当网侧状态发生改变时,阀侧要作何响应的问题。下垂控制具有天然适应性,能够顺应网侧变化趋势,控制源端做出相应调整。但这种天然适应性也可能掩盖电压控制点在参数设计上的不足,甚至可能在系统故障时引发系统电压向更深层次跌落。进而,电压参考值的整定成为了下垂控制中的一个重要环节。因此,本文提出一种基于电网等值和系统内电势、内阻抗辨识的电压控制点参数整定方法,能够有效解决上述问题。本文还探讨了虚拟阻抗技术对系统源端特性的影响,并结合多组仿真进行了论证。进一步地,提出了一种双向虚拟阻抗设计方法,有助于在系统正常运行时提升下垂控制作用效果和电压支撑构网能力,并能够在系统发生故障时有效抑制故障过电流。将本文提出的电压参考值设计方法及双向虚拟阻抗策略相结合,可获得更好的控制效果。
引文信息
秦晓辉,范宸珲,齐磊,等.构网型下垂控制本质及虚拟阻抗对其源端特性的影响分析[J].中国电机工程学报,2025,45(15):5930-5941.
QIN Xiaohui,FAN Chenhui,QI Lei,et al.Analysis of the essence of grid-forming droop control and the impact of virtual impedance on its source end characteristic[J].Proceedings of the CSEE,2025,45(15):5930-5941(in Chinese).
来源:中国电机工程学报