

技术拓荒录
人形机器人产业链可分为上游核心零部件、中游本体制造和下游系统集成及应用。接下来是核心零部件的拆解、对应的市场情况来分析。
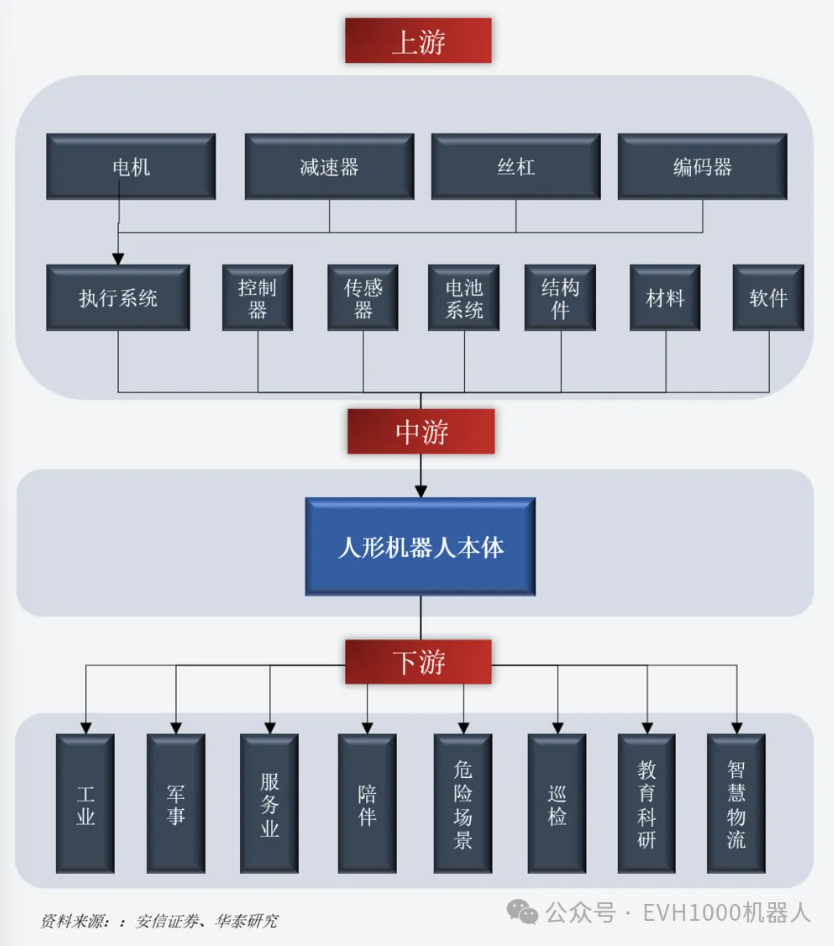
本篇着重拆解下在人形机器人的上游部分,汇聚了其最为核心的组件,主要涵盖电机、减速器、丝杠、控制器与传感器等硬件设施,以及与之相辅相成的软件系统。
从长远的视角审视,产业链中最为珍贵的部分非软件莫属。那些能够掌握或自主研发运动控制及人工智能算法等核心技术的企业,不仅将在技术层面引领人形机器人的演进方向与步伐,更将蜕变为该领域的“中枢”与“大脑”,同时还在中游的机器人本体制造领域占据主导地位。
基于当前的形势分析,传感器、减速器、电机以及丝杠等核心零部件在价值占比中居高不下,其增量的拓展空间亦十分显著。鉴于我国雄厚的工业基础以及完备的相关产业链,人形机器人核心零部件的发展潜力可谓巨大无比。
以头部的特斯拉的Optimus 为例,拆解其零部件主要组成部分和供应商:
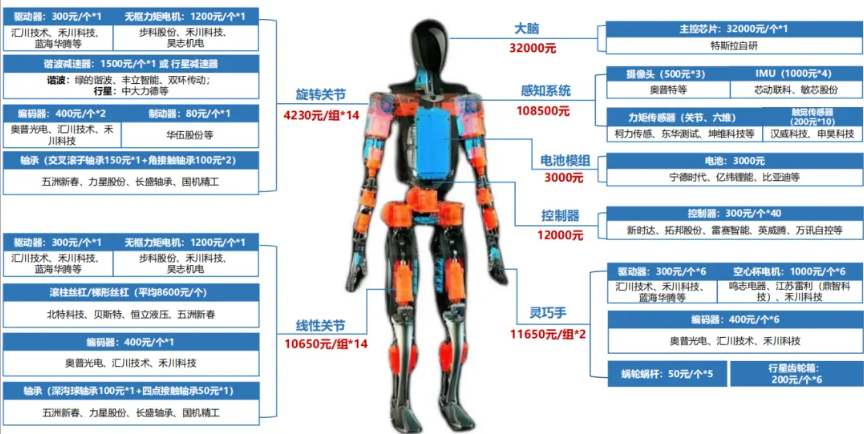
下图为特斯拉Optimus价值量拆分(基于2万美元成本前提)
从核心零部件的技术壁垒的难度排序:
行星滚柱丝杠 > 六维力矩传感器 > 谐波减速器 > 空心杯电机 > 无框力矩电机
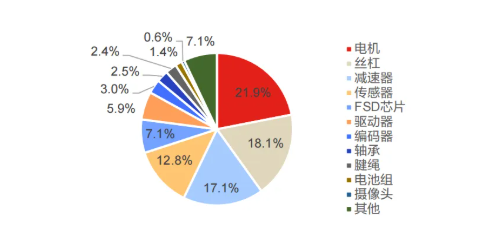
电机的价值占比21.9%,含无框力矩电机、空心杯电机,人形机器人关节多采用无框力矩电机,灵巧手多采用空心杯电机。
① 定义和组成
这是一种特殊类型的永磁无刷同步电机,没有轴、轴承、外壳等,仅含2个部件(定子和转子)。转子由带永磁体的旋转钢圆环组成,直接装在机器轴上;定子外部环绕钢片和铜绕组,产生攀附在机器壳体内的电磁力。
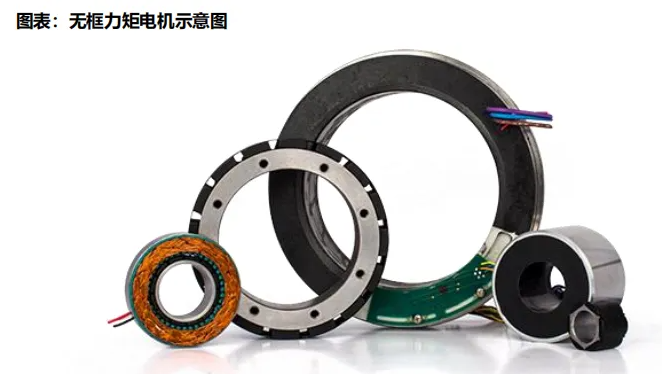
② 特点和作用
无框力矩电机是伺服电机的一种,质量轻、体积小、易集成和维护,运动响应快,能效高,虽研制难度大,但能在中低速运动中提供高扭矩,适用于人形机器人低速高力矩需求的线性关节和旋转关节。
③ 国内外企业竞争情况
22年市场规模为6.69亿,市场场规模不大;壁垒总体不高,国内企业有一定竞争力:目前主要壁垒在于:在磁路和工艺设计方面有一定技术壁垒,需要在低压供电的环境下输出更大功率。
① 定义和特点:
空心杯电机采用无铁芯转子和杯状绕组设计而成,尺寸小,直径不超过40mm,体积小、重量轻、响应快、能量转化率高。
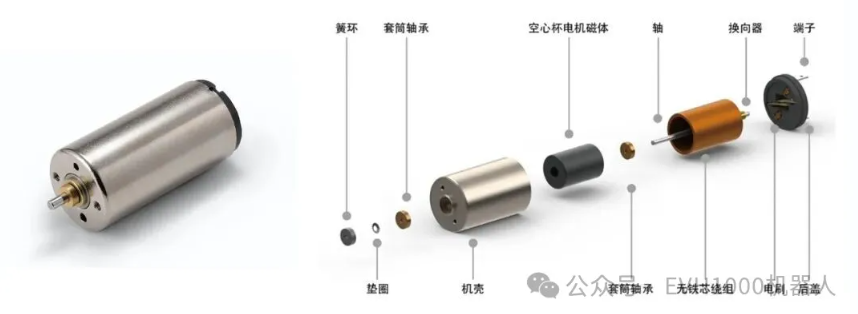

② 壁垒和应用领域:
空心杯电机的核心壁垒在于线圈设计、绕制和自动化设备,适用于航空仪表、数控机床等对电机结构和高灵敏度有要求的行业。
③ 市场竞争情况:
2023 年国内市场规模约为 11.38 亿元。我国空心杯电机市场集中度高且主要由外资占有,2023 年外资占 比约为 88%。
行星滚柱丝杠是机器人关节的关键部件,价值高且制造难度较大,国内以往多依赖进口。未来随着国产替代的实施,核心零部件的成本有望降低。行星滚柱丝杠以其体积小、精度高、输出大、耐用稳定等特点,在汽车、机床、机器人等领域逐渐取代原有技术,成为主流选择。
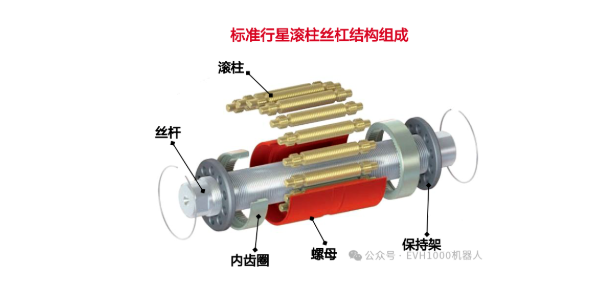
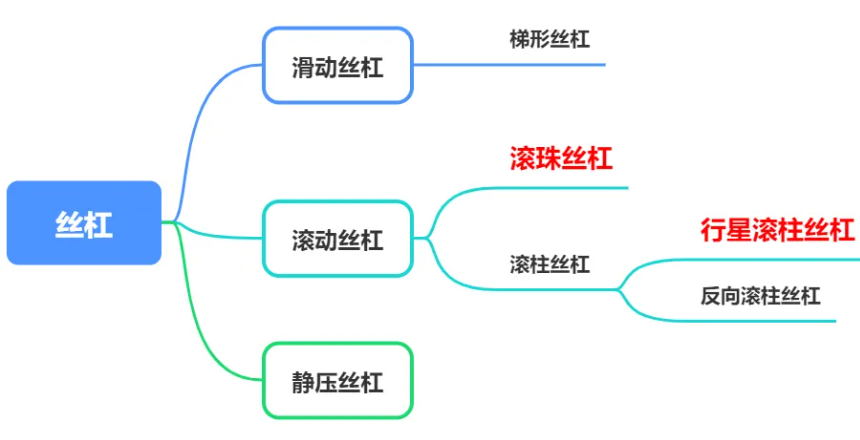
① 定义和分类
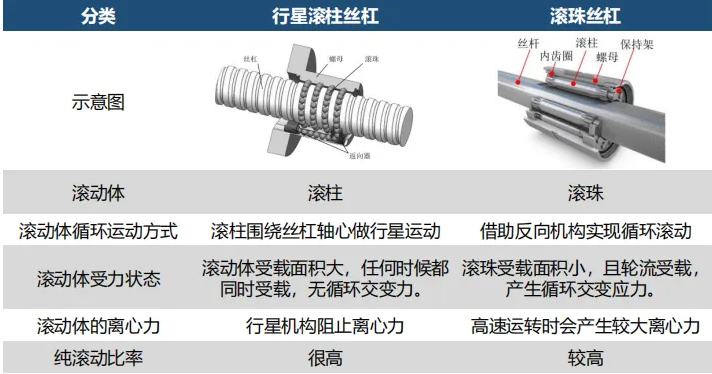
丝杠是一种将旋转运动转换成直线运动的机械装置,由丝杠轴和螺母组成,通过螺纹啮合实现水平移动。擦特性分为滑动丝杠、滚动丝杠和静压丝杠,其中滚动丝杠包括滚珠丝杠和行星滚柱丝杠。
滚珠丝杠摩擦力小、传动效率高、精度高,国产化率超60%;滚柱丝杠则具备高承载、耐冲击、体积小、速度快、噪音低、寿命长等特点。人形机器人的线性关节使用这两种丝杠,传动效率可达98%。
② 壁垒和应用
机器人零部件中,精度和纯度要求极高的微米P1级加工以及复杂的材料配方和热处理工艺是我国面临的主要挑战。
此前,滚柱丝杠多用于机床、航空航天、汽车等领域。在高端制造领域自主可控的趋势下,贝斯特、秦川机床等企业正在加速布局。
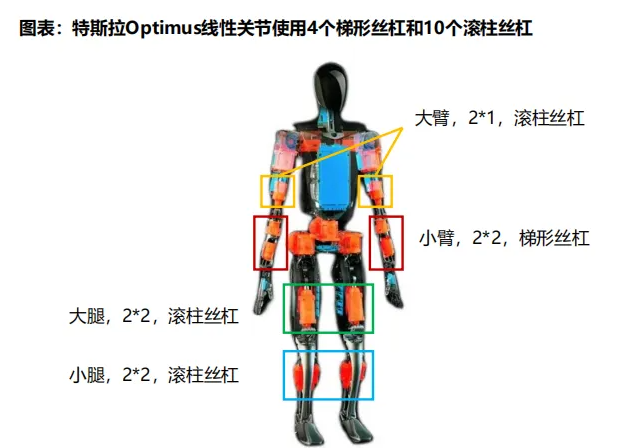
如特斯拉的线性关节,丝杠占比23%,其中梯形丝杠用于小臂,滚柱丝杠用于承载要求更高的大臂、大腿、小腿。
③ 市场竞争情况:
2023 年全球滚珠丝杠市场规模约为 19.6 亿美元,中国滚珠丝杠市场规模约为 20.5 亿元人民币。
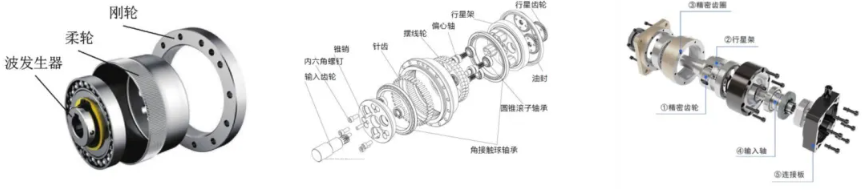
下图:谐波减速器(左)、RV减速器(中)、行星减速器(右)
① 定义与分类
减速器是连接动力源和执行机构的中间部件,用于改变转速、传递转矩并提高控制精度。人形机器人的减速器主要有谐波减速器、RV减速器和行星减速器三类。
RV减速器体积较大,在人形机器人领域应用有限。谐波减速器体积小、减速比大、精密度高,适用于身体旋转关节;行星减速器体积小、重量轻、传动效率高、寿命长,但精度较低,适用于手部关节或对精度要求较低的身体关节。
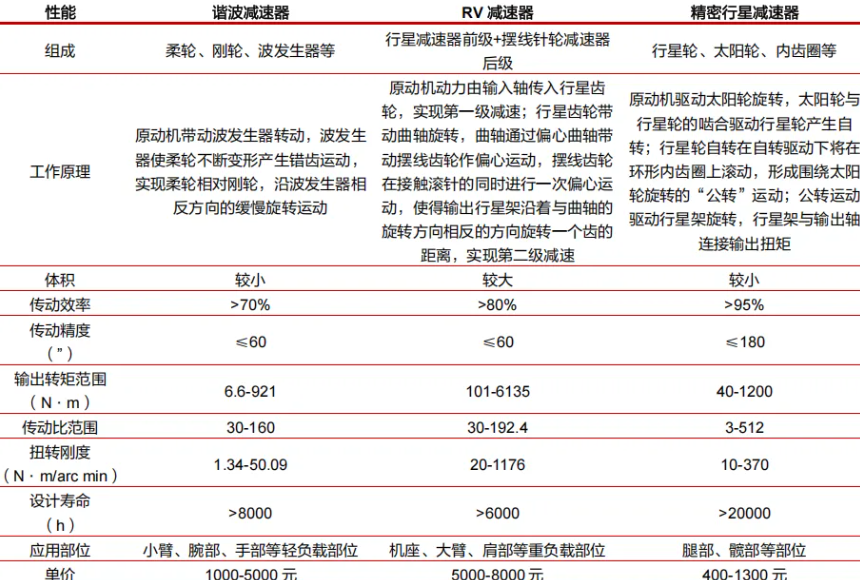
② 三大减速器区别对比
③ 市场竞争情况
据统计,2023 年全球谐波减速器、RV 减速器及精密行星减速器市场规模均在百亿元以内;据华经产业研究院,2023 年中国谐波减速器、RV 减速器及精密行星减速器市场规模分别为 24.3 亿元、50.22 亿元、35.36 亿元。
① 定义和分类
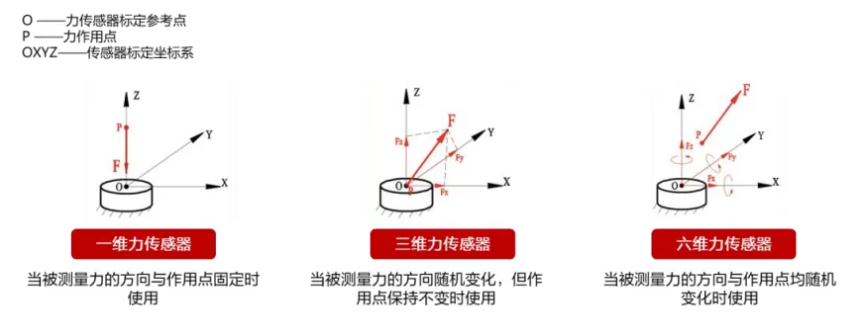
力矩传感器可检测扭转力矩,将物理变化转为电信号,优点多。力传感器能将力学量转为可用信号,按维度分有六种,其中一维、三维和六维常见。一维用于测固定方向和作用点的力。三维能测三维空间随机变化的力。六维力传感器维度最高,能测三维空间的力和力矩信息。
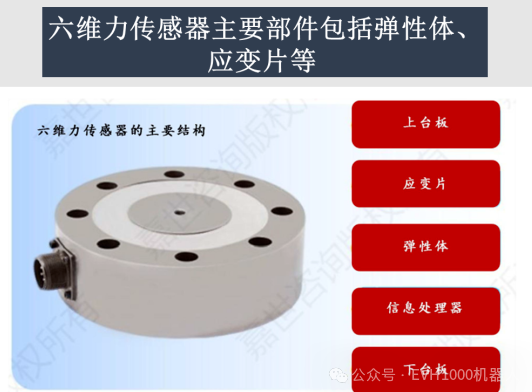
六维力传感器是维度最高的力传感器,能精确测量力在三维空间的XYZ轴三个方向的分力及分力矩信息,也被称作六轴力/力矩传感器或F/T传感器,用于测量X、Y、Z三个方向的力和Mx、My、Mz三个维度的力矩。
② 特点和应用
六维力传感器精度高,力学反馈全面,用于机器人、机床、汽车、航空等高端领域。力矩传感器是机械臂的关键,提供实时力和力矩信息,助力完成精细智能操作。
③ 市场竞争情况
2023年全球六维力传感器市场规模为2.25亿美元,中国为2.35亿元。因技术壁垒高、自动化生产程度低,其价格高达2.4-2.6万元,尚未形成规模效应,市场较小。
① 分类和区别
目前,除特斯拉Optimus采用纯视觉方案及“端到端”神经网络本地运行外,大多数机器人厂商如小米、宇树等仍使用多传感器融合方案。
机器视觉技术分为2D和3D两大类。2D成像技术使用传统RGB相机,只能捕捉物体表面纹理,无距离信息。3D视觉感知技术则补充了这一不足,实现更复杂的功能,主要包括飞行时间(ToF)法、双目立体视觉法和结构光法。
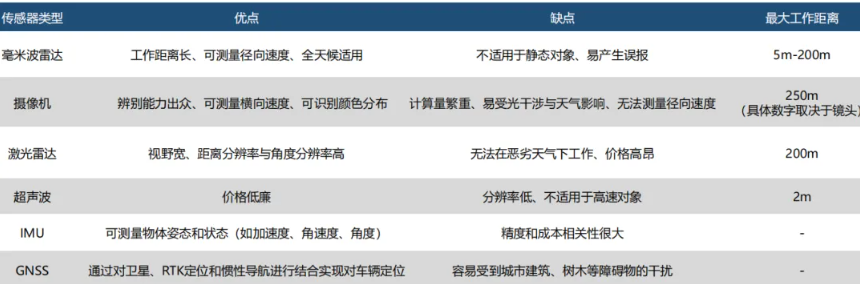
此外,还有毫米波雷达、激光雷达、摄像机、超声波和IMU等视觉传感器,它们的工作特性各异,具体区别见下图:
② 市场竞争情况
据 GGII 数据,2022 年,中国机器视觉行业的市场规模达到了170.65 亿人民币,我国机器视觉市场现阶段正处于快速增长阶段,到 2027 年有望突破 560 亿规模。
机器人触觉可感知温度、湿度、压力、振动等物理量,及物体材质软硬、形状结构等,实现精准定位与操作。它具有高柔韧性、拓展性和高弹性,又称柔性触觉传感器。

① 分类&发展趋势
机器人触觉能感知多种物理量及物体特性,实现精准操作。它具有高柔韧性、拓展性和弹性,也称柔性触觉传感器。
触觉传感器按原理分电容式、压阻式等,其中压阻式适合监测恒定压力变化,电容式结构简单,广泛用于可穿戴和医疗设备。压阻式和电容式较为常用,发展方向为大阵列和柔性化。特斯拉Optimus-Gen2手部触觉传感器可能引领行业新趋势。
② 市场竞争情况
预计2029年全球柔性触觉传感器市场规模53.22亿美元(22年约为15.3亿美元);2029年全球机器人触觉传感器市场空间将达到4.3亿美元。
① 基本介绍
控制系统是机器人的智能“小脑”(占比约2.9%)——控制器和主要控制的“大脑”(占比约7.6%)——主控芯片。主控芯片负责数据采集、处理和传输,以及智能决策,包括MCU、DSP、AI芯片和ASIC等类型。
机器人的“大脑”通常指主控芯片或计算平台(软件/人工智能模型),这些芯片不仅负责数据处理和控制,还支持各种复杂操作。主控芯片/中央处理器(CPU)集成了高性能计算单元和复杂算法,处理传感器数据,执行算法和逻辑运算,进行实时分析和决策,规划最优行动路径和执行方案,使机器人能够做出智能决策和响应。
人形机器人的主要应用场景包括生产制造、社会服务和特种作业。
在生产制造领域,可解决人口老龄化问题,缓解劳动力短缺,如用于农业采摘和制造业生产。
在社会服务领域,可担任公共服务员、家政服务员、物流配送员和安保巡逻员等岗位,为人类提供服务。
在特种作业场景,可在危险环境中替代人类,如深海、民爆、核电站等,也可在航空航天领域执行任务。