
机器人领主
来源:牛模王
导语: 确定了图像的“骨架”与“色彩”,我们来到决定成像瞬间清晰度的关键一步:快门类型。这是工业相机选型中最核心、也最容易因选择错误而导致图像“翻车”的环节。选择错误的快门,高速运动的物体会被拍成“果冻”或“残影”,精密测量将失去意义。本文将为您彻底厘清全局快门与卷帘快门的根本区别,并提供杜绝模糊的决策铁律。
一、快门的核心作用与两种实现方式
在相机内部,快门负责控制传感器“看到”光线的时间长度(曝光时间)。工业相机主要通过两种不同的传感器技术来实现曝光控制:全局快门(Global Shutter) 与 卷帘快门(Rolling Shutter)。
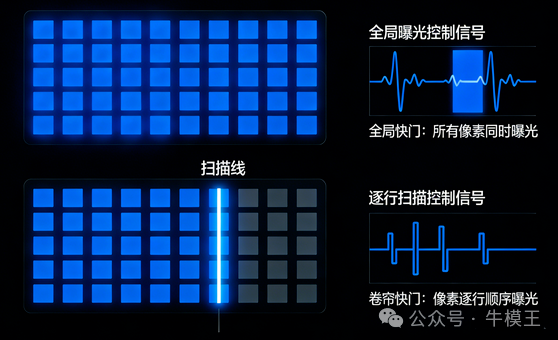
其最根本的区别在于:传感器上的所有像素点是同时曝光,还是逐行顺序曝光。
二、全局快门:为工业而生,定格瞬间
工作原理:
全局快门传感器内部集成了额外的存储单元。在曝光的起始时刻,所有像素同时开始收集光信号(电荷)。在曝光结束的瞬间,所有像素同时将收集到的电荷转移到相邻的、不感光的存储单元中暂存。随后,再从容地从这些存储单元中逐行或逐列读出信号。因此,它捕获的是整个传感器在同一个“时间切片”内的场景。
核心优势:
无运动畸变
这是其最核心的价值。无论物体运动多快,只要在曝光时间内,相机捕捉到的就是物体在那一瞬间的真实几何形状,边缘锐利,位置精确。这是机器人视觉引导、高速测量和检测的基础要求。 适用于频闪照明
可以与光源精确同步,在极短的曝光瞬间开启高亮度闪光,完美冻结高速运动物体,同时克服环境光干扰。
需要考虑的方面:
成本与复杂度
像素内集成存储单元增加了设计和工艺复杂度,通常成本高于同规格的卷帘快门传感器。 固有噪声可能略高
电荷转移过程可能引入额外的噪声,在极低光照、长曝光场景下,其动态范围有时可能不及顶级卷帘快门传感器。
典型应用场景:
高速运动物体检测
传送带上快速移动的包裹、瓶盖、零部件。 机器人抓取与引导
机械臂动态跟踪、无序分拣。 振动环境下的检测
生产线震动时,仍需保证图像清晰。 任何需要精确几何测量的场景
三、卷帘快门:静态画质的性价比之选
工作原理:
卷帘快门没有全局的电荷存储节点。它的曝光和读出是逐行进行的。当第一行像素开始曝光时,第二行稍晚开始,依此类推,直到最后一行。一行曝光结束后,通常直接在该行进行模数转换并读出,然后下一行才开始曝光(或存在短暂重叠)。因此,它捕获的不是一个瞬间,而是一个从顶到底的“时间带”。
核心优势:
像素结构简单
没有额外的存储单元,像素填充率(有效感光面积占比)可以做得更高。 潜更高的画质
在静止或低速场景下,能实现更低的读出噪声、更高的动态范围和更好的低光照性能,图像质量潜力高。 成本更具优势
通常价格低于同分辨率的全局快门相机。
核心劣势:
果冻效应
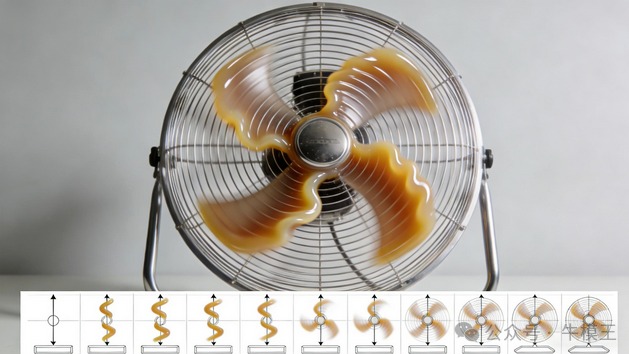
这是其最致命的缺点。拍摄高速运动的物体或相机自身快速移动时,由于图像上下部分记录的时刻不同,会导致直线变斜、旋转物体变形,完全无法用于精确测量 频闪同步问题
在日光灯等频闪光源下,可能拍摄到明暗相间的条纹。
典型应用场景:
静止物体的高精度检测
显微镜下的样本观察、电路板静态拍照。 低速、匀速运动的扫描应用
(配合得当,可视为准静态)。 对图像画质(动态范围、低噪点)要求极高,且物体绝对静止的场景
,如高端摄影测量。
四、核心决策铁律与流程图
选择快门类型的决策逻辑比前两步更为直接和强硬,因为它直接关系到图像是否“可用”。
黄金决策铁律:
“只要物体在曝光期间存在相对明显的运动,就必须选择全局快门。只有在物体可被视为完全静止时,才考虑卷帘快门以获取可能的画质或成本优势。”
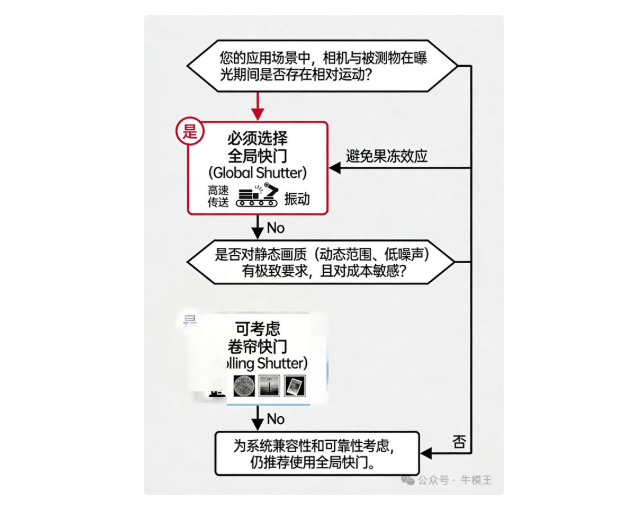
一句话总结:在工业自动化领域,全局快门是保障成像可靠性的“安全绳”,而卷帘快门是特定静态场景下追求极致性价比或画质的“备选项”。 当您不确定时,选择全局快门总是更保险的。
五、总结
快门的选择,是工业相机选型中一条不容妥协的硬性规则。它无关乎“哪个更好”,而关乎“哪个能用”。全局快门保障了运动图像的真实性,是动态视觉系统的基石。