

数据茧语者
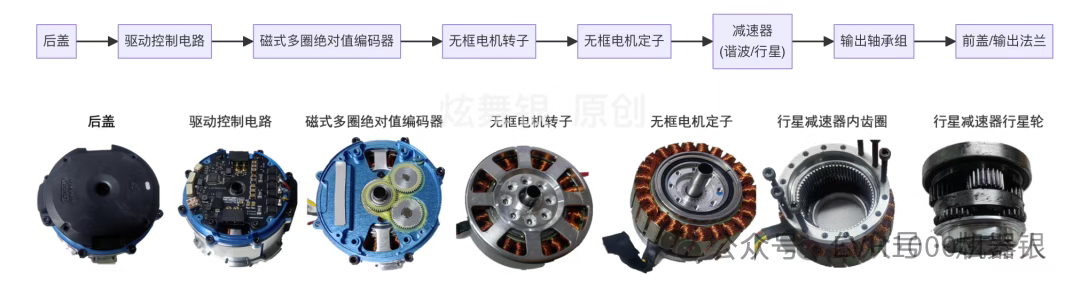
在人类骨骼中,肩膀、肘部、膝盖这些位置就是“关节”。对于机器人而言,每一个关节模组,实际上就是一个具备自驱能力、姿态感知、精密输出的高集成部件,通常由驱动控制电 + 编码器 + 无框电机 + 减速器 + 力矩传感器(可选) + 输出法兰组成。本编旋转关节以智元灵犀X1的R86-2为例进行介绍,使旋转关节更具象化。
典型的人形机器人旋转关节一般由以下结构组成,以灵犀X1 R86-2为列:
1
驱动控制电路
在一个高度集成的旋转关节模组中,驱动控制电路是整个关节的“大脑与神经中枢”,它连接着电源、主控、编码器、电机与传感器,是实现关节精密运动控制的核心模块,主要有以下几个功能:
1
三环控制核心
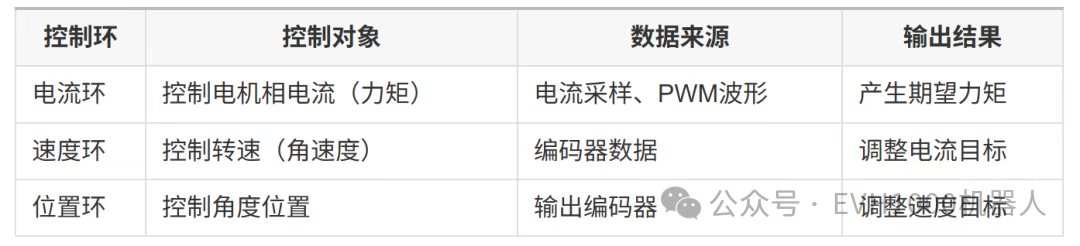
在机器人关节控制中,所谓“三环控制”指的是由电流环(力矩)、速度环和位置环三层嵌套的伺服控制结构。 就像人类运动系统一样:
◽ 电流环好比肌肉的收缩力度(决定施力);
◽ 速度环是动作的快慢(调节力量变化率);
◽ 位置环则是最终关节要达到的位置目标。
驱动控制电路内部一般集成了一个高性能微控制器(MCU)或FPGA,执行电机的控制逻辑,通常包括:
在机器人关节控制系统中,位置环-速度环-电流环(合称“三环控制”)是实现精准伺服控制的标准框架。根据控制器部署位置不同,三环控制系统大致可分为以下三种典型形式:
在智元灵犀开源代码agibot_x1_infer中可以看出:其采用的是分布式控制,即上位机负责位置环和速度环,驱动器本地实现电流环闭环。
机器人关节驱动板(即底层的actuator/驱动器)主要实现了电流环(力矩/电流控制),而三环(位置-速度-电流)中的速度环和位置环控制逻辑并未在驱动板内实现,而是在上位机(DCU)侧完成。
在人形机器人中,将位置环与速度环放在上位机或 DCU 中,是为了实现全身行为的一体化规划与动态协调;而关节驱动器只保留快速执行所需的电流环控制,以获得高速、稳定、精确的响应能力。这种“全局规划 + 局部伺服执行”的模式,正是近年来像 Figure 01、Unitree H1、Digit、傅利叶 GR-1 等人形机器人广泛采用的控制趋势。
2
传感器数据读取和处理
在人形机器人关节模组中,驱动控制板(Drive Controller)是传感信息的融合处理器,对编码器和力矩传感器的数据进行采集,然后上传给上位机DCU等,在现代高性能机器人(尤其是人形机器人)的主流方案:
◽ 采集本关节的编码器数据和力矩传感器数据。
◽ 通过总线(如CAN、EtherCAT等)上传这些数据给上位机(DCU)。
◽ 接收上位机(DCU)下发的期望参数(位置、速度、力矩、Kp、Kd)。
◽ 在本地只实现电流环(力矩环)控制,确保电机电流/力矩能快速准确跟随上位机指令。
◽ 驱动器收到这些参数后,只做底层电流环控制,让电机电流/力矩快速跟随上位机的期望值。刚度Kp、阻尼Kd等参数,通常用于实现“软硬切换”或阻抗控制,驱动器只是按上位机要求执行,不做高层决策。
软硬切换:“软硬切换”是指通过实时调整关节的刚度(Kp)和阻尼(Kd)控制参数,使关节在“刚性控制”(Hard Mode)与“柔顺控制”(Soft Mode)之间切换,从而在不同应用场景下实现性能与安全性的权衡。
阻抗控制: 是一种让机器人关节/末端对外界力产生“弹簧-阻尼”响应的控制方法,灵巧手、协作机器人等高端应用,通常会在关节或末端安装六维力/力矩传感器,实现更高精度的阻抗控制
3
电源管理与保护
驱动控制电路直接连接直流母线(如48V或24V),因此必须具备:
◽ 过流保护
◽ 过温保护
◽ 欠压/过压保护
◽ 电源软启动
◽ 霍尔/电流传感器接口
部分设计会加入MOS/IGBT控制模块与散热片,支持峰值几十安培的输出电流,保证快速响应同时不损坏器件。
2
无框电机
无框电机是一种特殊的无刷电机(BLDC),它没有传统意义上的机壳(Frame)、输出轴。它仅由定子和转子两部分组成,通常嵌入机器人关节、无人机或医疗设备的内部结构中。
上图中R86-2旋转关节图可以看出,无框电机的定子通过“过盈配合”的方式与行星减速器的内圈和外部箱体进行固定安装。
无框电机的结构:
◽ 定子(Stator):固定不动,缠绕着线圈,通电产生磁场。
◽ 转子(Rotor):可旋转,嵌有永磁体,随磁场转动。
' fill='%23FFFFFF'%3E%3Crect x='249' y='126' width='1' height='1'%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E)
上图展示的是灵犀X1 R86-2机器人关节模组的核心部件,从左至右依次为:高精度行星减速器、无框电机转子、无框电机定子。该关节模组采用了“无框电机+高精度行星减速器”的一体化集成设计,具体结构与功能如下:
◽ 高精度行星减速器(左)
负责将电机高速、低扭矩的输出转换为低速、高扭矩的输出,提升关节的负载能力和控制精度。
采用紧凑型设计,便于与电机深度集成,输出轴通常与编码器直接耦合,实现高精度位置反馈。
◽ 无框电机转子(中)
采用永磁体环形结构,直接套装在减速器输入端轴上,实现与减速器的同轴集成。
无框设计(无外壳、无轴承),便于与减速器、编码器等部件高度集成,降低体积和重量。
◽ 无框电机定子(右)
由多组铜线绕组和铁芯组成,外部有三相电源线引出。
与转子配合产生电磁力,实现高效、响应快速的驱动。
◽ 装配方式与技术特点
——同轴一体化设计:减速器安装在电机定子内部,电机转子套装在减速器输入轴上,形成高度集成的同轴结构。
——高扭矩密度与高精度:无框电机+高精度减速器+多圈绝对值编码器的组合,既保证了关节的高动力输出,又实现了高精度的位置与速度反馈。
——模块化、轻量化:无框电机和减速器深度集成,体积小、重量轻,便于机器人关节的模块化设计和维护。
高可靠性:磁编码器无接触、无磨损,抗干扰能力强,适合复杂环境下长期运行。
3
减速器
减速器作为机器人关节模组中实现“高扭矩、低速输出”的关键部件,其结构类型多样,常见的有RV减速器、谐波减速器、行星减速器、摆线针轮行星减速器等。不同类型的减速器在结构原理、传动效率、体积重量、成本和适用场景等方面各有特点。
◽ RV减速器
采用摆线针轮与行星齿轮复合传动,具有高承载能力、高刚性和高精度,常用于大型工业机器人和重载机械臂,但体积较大、成本较高,不适合空间受限的小型机器人。
◽ 谐波减速器
通过柔性齿轮(柔轮)、刚性齿轮(刚轮)和波发生器实现高减速比和高传动精度,结构紧凑、重量轻、回程间隙小,非常适合空间有限、对精度和轻量化有较高要求的人形机器人、协作机器人等。其缺点是承载能力有限,柔轮易疲劳损坏,成本相对较高。
◽ 行星减速器
由太阳轮、行星轮和内齿圈组成,结构简单紧凑,传动效率高,承载能力较强,成本适中。行星减速器在中小型机器人关节中应用广泛,尤其适合对体积、重量和成本有一定要求的场合。其回程间隙和精度略逊于谐波减速器,但通过高精度制造工艺也能满足大部分机器人应用需求。
◽ 摆线针轮行星减速器
结合了摆线轮和行星齿轮的优点,具有高减速比、高承载能力和高效率,常用于重载、低速、高精度的工业场合,但结构复杂、体积较大,在人形机器人中应用较少。
在人形机器人领域,由于关节空间有限、对轻量化和高精度的需求突出,同时还要兼顾成本控制,谐波减速器和行星减速器成为最常用的两类减速器。
1
行星减速器
行星减速器是一种结构紧凑、传动效率高、承载能力强的减速装置,广泛应用于机器人、自动化设备、精密机床等领域。要理解一款行星减速器的结构和工作原理,首先需要理清其核心部件和动力传递路径。
主要结构组成:
◽ 太阳轮(Sun Gear):位于减速器中心,通常与输入轴刚性连接,是整个行星减速器的动力输入端。电机的动力首先传递到太阳轮。
◽ 行星轮(Planet Gears):多个小齿轮均匀分布在太阳轮周围,与太阳轮啮合。行星轮通过行星架(Planet Carrier)固定在一起,并能绕太阳轮自转和公转。
◽ 内齿圈(Ring Gear):环绕在行星轮外部的齿圈,内侧有齿,与所有行星轮啮合。内齿圈通常固定不动,也有部分结构设计为输出端。
◽ 行星架(Planet Carrier):用于支撑和连接所有行星轮,通常作为减速器的输出端,将行星轮的运动合成为输出轴的旋转。
动力传递路径:
◽ 输入轴:与太阳轮刚性连接,电机的动力首先传递到太阳轮。
◽ 减速装置:太阳轮带动多个行星轮自转,同时行星轮在内齿圈内公转,实现动力分流和减速。
◽ 输出轴:行星架与输出轴连接,将所有行星轮的运动合成为输出端的旋转,实现减速增扭。
2
谐波减速器
谐波减速器是一种结构新颖、传动精度高、体积小、重量轻、减速比大且无间隙的减速装置,广泛应用于机器人、航空航天、精密仪器等高端领域。要理解一款谐波减速器的结构和工作原理,首先需要理清其核心部件和动力传递路径。
主要结构组成:
◽ 波发生器(Wave Generator):通常由椭圆形的凸轮和柔性轴承组成,安装在输入轴上。波发生器的作用是将输入轴的旋转运动转化为柔性齿轮的弹性变形。
◽ 柔性齿轮(Flexspline):一个薄壁、开口的弹性金属圆筒,外侧带有齿轮齿。柔性齿轮的齿数略少于刚性齿轮。柔性齿轮套在波发生器外部,随波发生器的椭圆形变形而周期性地与刚性齿轮啮合。
◽ 刚性齿轮(Circular Spline):一个内齿圆环,齿数比柔性齿轮多2个齿,一般固定不动。刚性齿轮的内齿与柔性齿轮的外齿啮合,所以当波发生器旋转一周,柔轮往前走2个齿。
◽ 输出端:通常与柔性齿轮的开口端或刚性齿轮连接,将减速后的运动输出。
动力传递路径
◽ 输入轴:与波发生器刚性连接,电机的动力首先传递到波发生器。
◽ 减速装置:波发生器旋转时,带动柔性齿轮发生椭圆形弹性变形,使柔性齿轮的齿与刚性齿轮的齿在两个区域啮合。由于柔性齿轮的齿数比刚性齿轮少,每转一圈,柔性齿轮相对于刚性齿轮会慢转几个齿,实现高减速比。
◽ 输出轴:通常与柔性齿轮连接,将减速后的旋转运动输出,实现减速增扭和高精度传动。
5
力矩传感器
力矩传感器,也叫扭矩传感器,是一种能将扭转力(或称“力矩”)转换为电信号的敏感元件。它像是机器人的“肌肉感觉”,让机器人知道自己到底“用了多大的力”。常见的结构原理包括应变片式、磁致伸缩式、光纤传感等,其中以应变片最为普及,广泛应用于机械臂、机器人、协作臂、自动化工具中。
按照维度,力矩传感器分为:
在实际的机器人关节设计中,出于成本、体积、可靠性和控制系统复杂度等多方面的考虑,绝大多数旋转关节组件并不会直接集成力矩传感器。力矩传感器虽然能够直接测量关节输出的实际力矩,但其价格贵、结构复杂、易受干扰且维护成本高。因此,行业内普遍采用一种“折中方案”来实现对关节输出力矩的估算。
这种方案的核心思路是:利用电机电流、编码器数据和运动学/动力学模型,间接推算出关节的输出力矩。
具体流程如下:
◽ 电机电流采集:通过驱动器或控制板实时采集电机的电流数据。由于电机的输出力矩与电流成正比(受电机参数影响),电流可以作为力矩的基础估算依据。
◽ 编码器数据采集:通过编码器获取电机轴或关节轴的实时位置和速度信息。这些数据不仅用于闭环控制,也为后续的力矩推算提供必要的运动状态参数。
◽ 运动学/动力学模型变换:结合机械结构的运动学和动力学模型(如齿轮传动比、并联/串联结构的雅可比矩阵、摩擦补偿等),将电机侧的力矩(由电流推算)通过模型变换,推算到关节输出端,得到实际的关节输出力矩。
◽ 输出力矩估算:最终,系统根据上述数据和模型,实时估算出每个关节的输出力矩,用于控制、保护和状态监测等功能。
以灵犀X1为例,其开源项目 agibot_x1_infer 的源码中可以看到,系统正是采用了“电机电流 + 编码器数据 + 运动模型 → 推算输出力矩”的主流方案。在其关节驱动与传动相关的代码实现中:
◽ 首先采集电机的电流(或力矩估算值)和编码器数据;
◽ 然后通过一系列运动学/动力学变换,将这些数据映射到关节输出端;
◽ 实现了无需力矩传感器的力矩估算与反馈控制。
这种方案在保证成本可控和系统可靠性的同时,也能满足大部分机器人应用对力矩估算的需求,因此被广泛采用。